
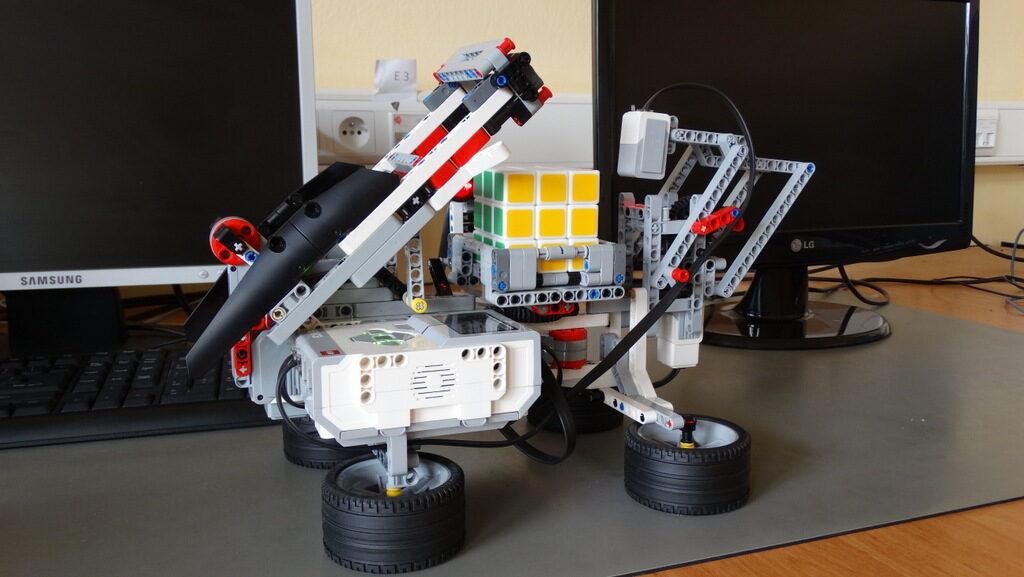

To cudeńko to istna legenda naszej sekcji. Gdy tylko pierwszy raz go uruchomiliśmy to wiedzieliśmy, że zostanie z nami na bardzo, bardzo długo. To niekwestionowany zwycięzca wszelkich konkursów, na zachwyty, „ochy i achy” każdego festiwalu i wydarzenia w którym nasza sekcja bierze udział. W oczach przeciętnego śmiertelnika (i naszych de facto też) wykonuje rzecz niemożliwą i to z sobie właściwą gracją. Nie mieliśmy serca go rozbierać, ale po długim czasie eksploatacji mechanizm zaczął płatać figle, a oprogramowanie wyraźnie uznało, że czas na małe SPA 😉 Włożyliśmy całe serce w odnowienie naszego cuda, ulepszenie go pod kątem konstrukcyjnym i programistycznym. Teraz nasz pogromca kostek działa szybciej, lepiej i zdecydowanie bardziej bezawaryjnie. Ogrom napisanych linijek kodu obejmuje wszystkie algorytmy układania kostki. Budowa robota została tak zaprojektowana, żeby zużyć jak najmniejszą ilość klocków LEGO. Do samego układania kostki zostały użyte tylko 3 silniki, które w bardzo szybki sposób (jak na standard LEGO Mindstorms) są w stanie ułożyć nawet najbardziej skomplikowany układ. 🙂
Po rozpoczęciu działania programu robot rozpoczyna kalibrację czujnika kolorów, odległości oraz ustawienie wszystkich silników w pozycji startowej. Następnie program prosi o wstawienie kostki na tacę. Kolejnym etapem jest start licznika czasu i skan każdej ściany. Robot robi to za pomocą czujnika kolorów – każda ściana zostaje zapisana do pamięci. Kiedy ten podprogram zakończy działanie wtedy następuje chwila, kiedy EV3 Brick za pomocą bazy algorytmów znajduje najkrótszą drogę do ułożenia kostki, wypisuje liczbę tych kroków na ekran. Ostatecznie robot zabiera się za układanie kostki co można zobaczyć na naszym filmiku. Kiedy kostka zostaje ułożona, CubeMaker6K wiwatuje z radości rozwiązania swojego zadania. 😉
Do budowy wykorzystano:
Poniżej zapraszamy do obejrzenia galerii zdjęć naszego robota. Dostępny jest również filmik.
