
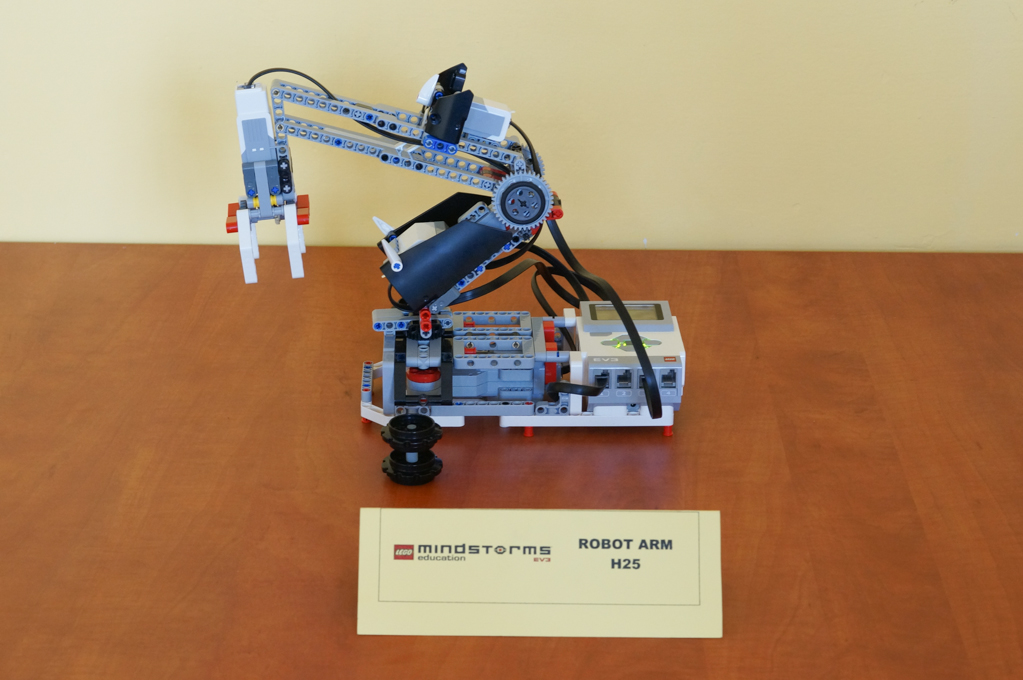

Próbując osłodzić sobie życie dorzucając kostki cukru do swojej kawy, drużyna czerwonych wpadła na pomysł, by zautomatyzować tę czynność za pomocą robota. W tym celu dopili swoją kawę i czym prędzej wzięli się do pracy. Gdy byli gotowi, postanowili pochwalić się swoim dziełem. W ten oto sposób swój debiut na arenie międzynarodowej miał robot Arm H25, który swymi rozmiarami nie przewyższał ekspresu do kawy.
Główną (i w sumie jedyną) funkcją tego zmechanizowanego ramienia była możliwość przenoszenia (bądź też rozrzucania na lewo i prawo) obiektów znajdujących się w jego zasięgu. Uzbrojony w trzy silniki, 665 koni mechanicznych i masę klocków tworzących jego strukturę robot, potrafił swoimi wyczynami zaskoczyć niejednego członka naszej sekcji. Po uruchomieniu programu, Arm H25 ustawia się w pozycji startowej, a następnie, za pomocą chwytaka, łapie swą zdobycz. Chwycony w ten sposób przedmiot zostaje podniesiony z pomocą wysięgnika i przeniesiony do docelowego miejsca, w którym następuje zwolnienie blokady, a tym samym opuszczenie danej rzeczy na ziemię. Robot może wykonać tę czynność kilka razy pod rząd, dzięki czemu nasza kawa nie będzie już nigdy gorzka (no chyba, że skończy się cukier). Od tej pory życie naszej sekcji opływało w słodycz. Koniec.
Do budowy robota Arm H25 zostały użyte:
Poniżej znajdziesz galerię ze zdjęciami Arm H25
