
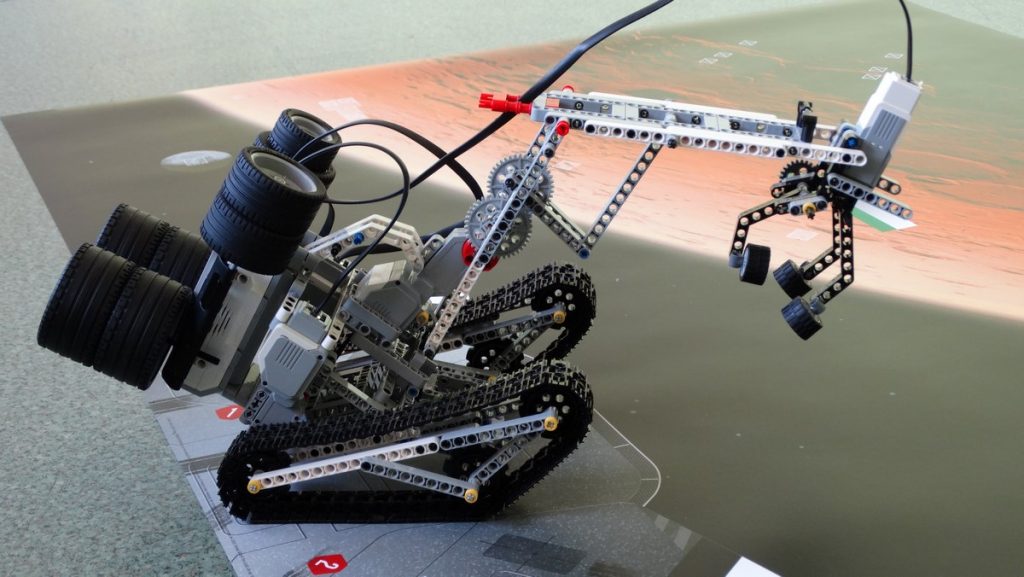

Świat potrzebuje robotów zdalnie sterowanych dlatego też nasza drużyna zabrała się za budowę Łaziko-chwytaka. Po kilku nieudanych próbach, rozbiórkach i przeróbkach powstał jedyny w swoim rodzaju łazik – Dziobak 2000.
Robot składa się z podwozia, czyli dwóch gąsienic przystosowanych do wjazdu na nie wysokie przeszkody, tułowia, w którym znajduje się kostka i jest połączeniem między ramieniem a silnikami oraz z ramienia wyposażonego w chwytak. Sterowanie jest oparte na połączeniu telefonu przez aplikację Mindstorms Remote z kostką. Przez wymieniony program możemy sterować robotem na tzw. Padzie. Może poruszać się w przód, w tył, skręcać na boki, podnosić i opuszczać ramię oraz chwytać/wypuszczać nieduże przedmioty.
Do budowy Dziobaka 2000 zostały użyte:
Poniżej zapraszamy to oglądania galerii naszego robota.
